こんにちは、三年の新原です。
いままで興味があったクアッドコプターを友人三人で作成してみたので記事にしてみました。
制作した理由
今学期にメカトロニクスという講義を受講して、メカトロ作品発表会なるものがありました。
ルールは以下のとおり
- 四人以内のグループまたは一人で、何らかのメカトロニクスの作品を制作
- 何らかの回路とプログラム等….
概要
大きさ 100mm*100mm
重量 30g
製作時間 1ヶ月
一基あたりの値段 9000円
使用した主な部品
- マイコン
STM32F103CBT6 - ジャイロセンサ
L3G4200D - FET
2SK2111 - zigbee
TWE-Lite
機体制作
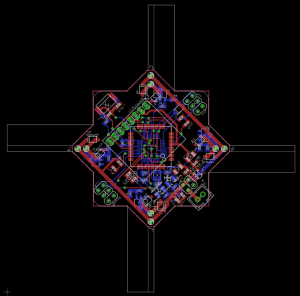
まずEAGLEにて回路の設計を行いました。
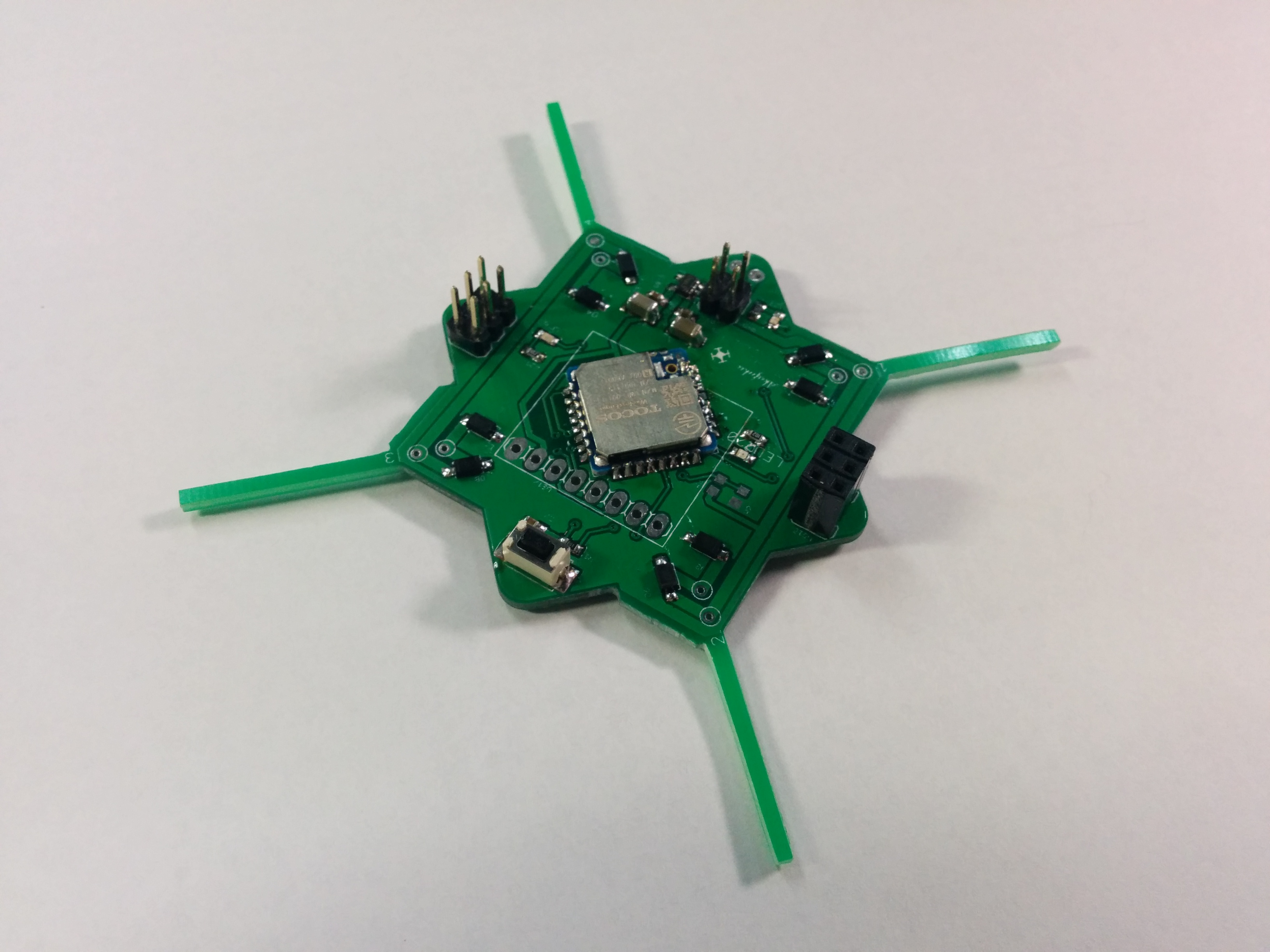
作成したデータを業者に発注すると下の写真のような何も部品が実装されていない基板が届きます。
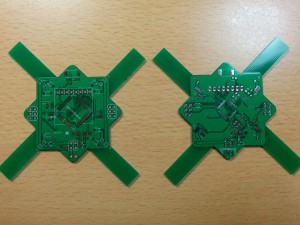
これに部品をハンダ付けすると
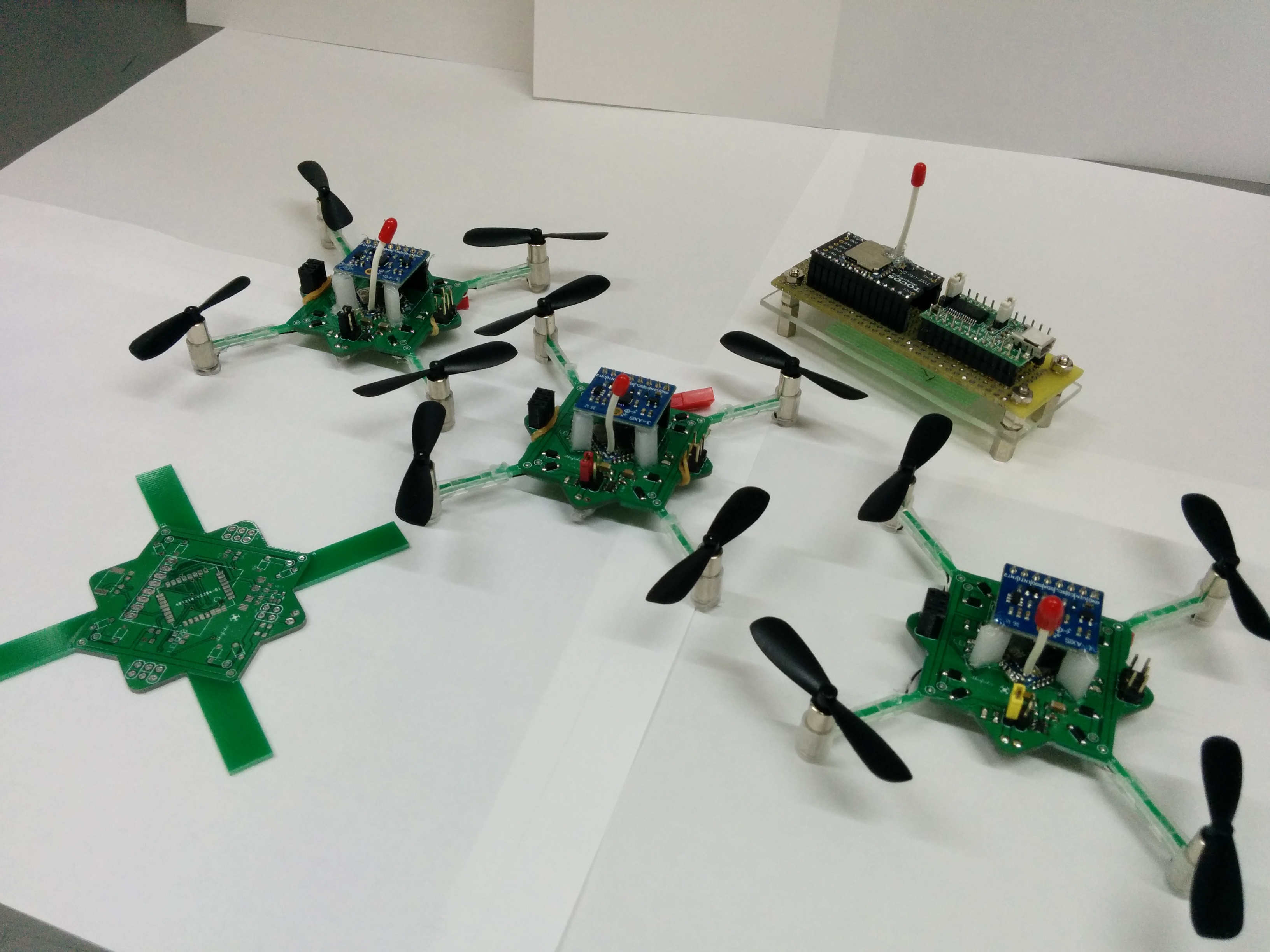
このようになりまうす。最後にモータやプロペラをつけると、、
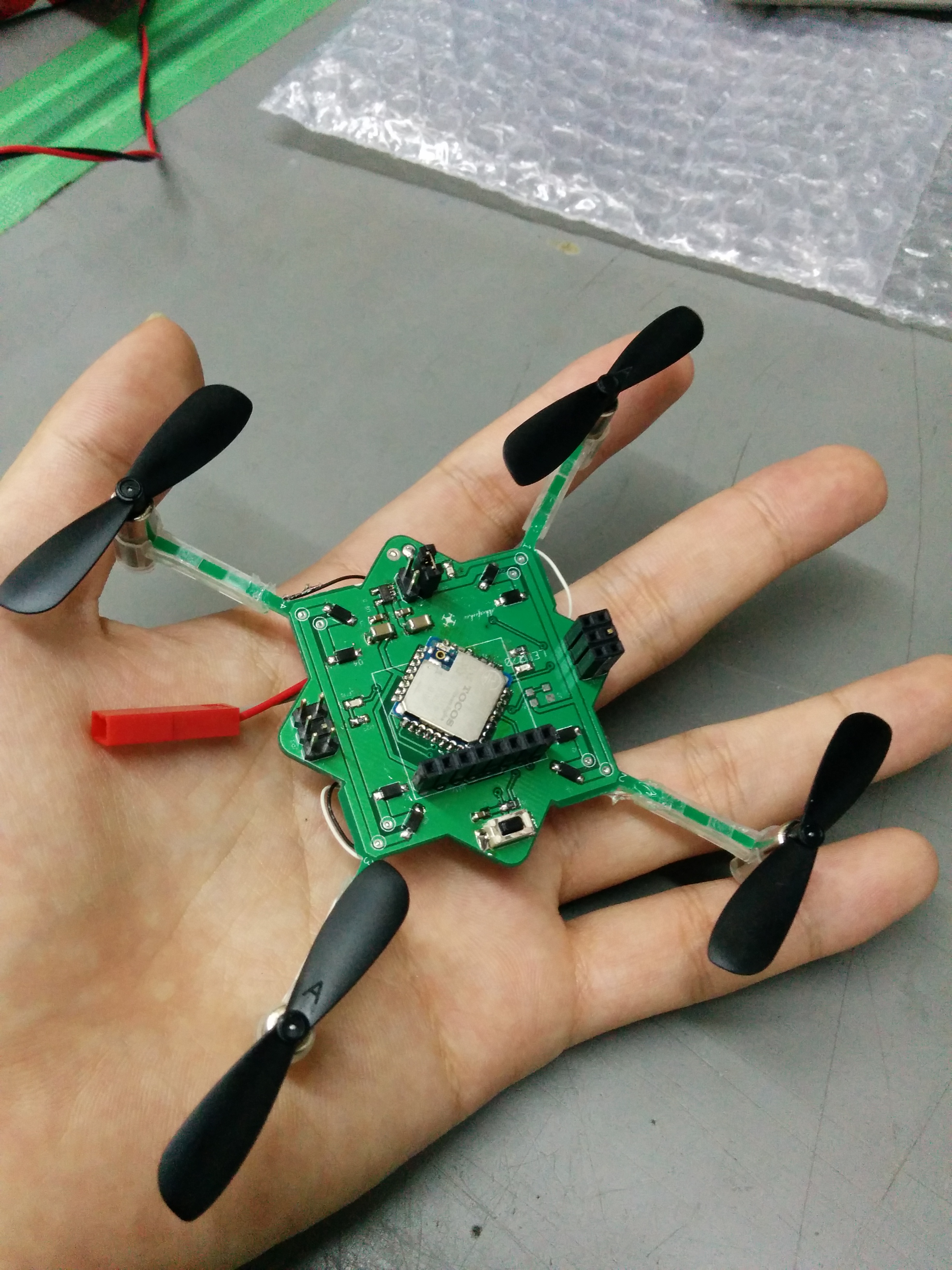
機体の完成です。
プログラム
モータドライバの動作確認を含む各種機能の動作確認を行いました。PWMにてモータドライバの動作確認の様子がこちら
今回はセンサとしてジャイロセンサのみ乗っけていたので、角度と加速度を用いてPD制御を行いました。
対角のプロペラを停止させて、P制御、D制御、PD制御を比べた動画がこちら。
全体の接続図は以下のようになりました。
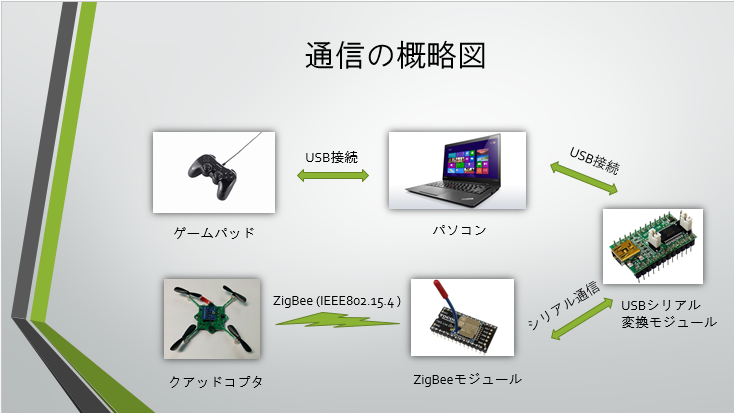
PC側のプログラムをJavaにて適当に作成し、クアッドコプターをラジコンのようにゲームパッドにて操作できるようにしました。
実際に飛ばしてみた動画がこちら
そこそこ飛んでいるように見えますが、機体の重量がぎりぎりなのと、すぐにLipoの電圧が下がってしまって30秒程度しか飛ばないクアッドコプターでした。。。。残念。
反省点
機体重量が重くなってしまった。機体重量の目標値を20gとしてましたが、結局30gとなってしまった。
開発時間が短かった。メカトロニクス発表会の課題発表があってから作品を作成し始めるまでの時間が長すぎて、開発に時間が余り割けなかった。
感想
やる気があればブラシレスとか9軸センサとか乗っけてリベンジしたいです。
今回はじめて空をマシンを作りましたが、思っていたよりも短時間で作成出来ました。
参考にしたサイト
Bitcraze
http://www.bitcraze.se/
このプロジェクトに使われているモータとモータマウンタを今回は使用しました。
おまけ
メカトロ作品発表会にて使用したスライド