今年度から2年の砂糖です。私が1年の夏休みに行った活動の報告をしようと思います。
AIに興味があり、DQN(deep Q-network)のプログラムを作成しました。
DQNとは大まかに説明すると、強化学習をするAIです。試行錯誤を繰り返すことにより、強化学習を行うことがです。
下のような迷路を
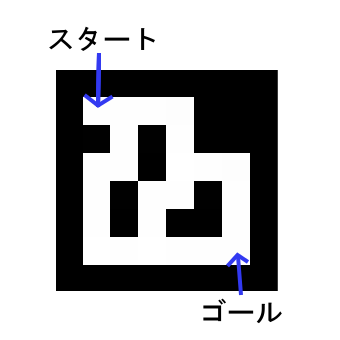
DQNに解かせるとこんな感じに↓(gifが動かない場合クリックしてください)
このDQNを使って何かしたいな~と。
色々考えた結果、DQNに倒立振子をさせてみたら面白そうだと考えました。
倒立振子とは2輪のロボットがセンサの値をもとにタイヤを動かすことによりバランスをとり、立った状態を維持するロボットです。(うまく説明ができない)
今回は2輪のタイヤを動かす普通の倒立振子ではなく、円盤を空転させてバランスをとる倒立振子を作成することにしました。
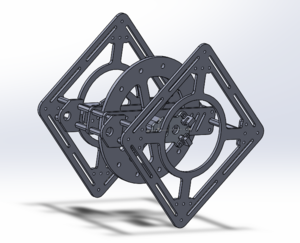
まずコンピューターで機体の設計↓ 今回は下の画像のように機体の角が接地し、中央の円盤が回して制御することで、この状態を維持することを目標とします。
ロボ研にあるncフライス(コンピューター制御でドリルが動く工作機械です)でプラスチックの板を加工し、部品を切り出し、組み立てる↓
回路を作成し、機体にセンサと回路を取り付けてひとまず完成!

しかしここで問題発生。モーターを長時間回すとモーターの熱の影響?でモーターのパワーが落ちる問題が発覚。
この時期に私が他のことで忙しくなったりと、十分な時間が確保できないため、倒立振子の作成を断念することにしました。
いつかリベンジしたいですね~。