2008-第15回かわさきバトルロボットトーナメント報告書(Versinthe) – R.U.R
2008年度 第15回かわさきバトルロボットトーナメント報告書
マシン名: Versinthe
電気電子工学科 大作一矢
1.試合結果
敗者復活2回戦敗退
2.機体解説
[1]コンセプト
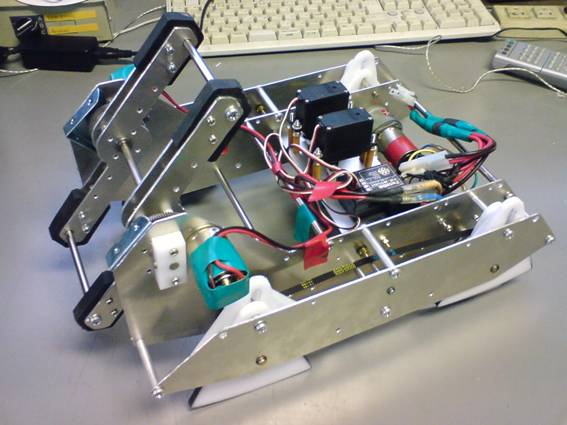
今回は「非展開型・偏心カム使用・タイミングベルト使用・小型高速機・電装系の改良」を目標に設計・製作を行った。規定サイズ(250mm*350mm)に収まり、かつギアード380を同軸上に固定する設計では、片側の足のユニットに許される厚さは50mm程しかない。この厚さに足を納めるのに少し苦労した。
[2]各部解説
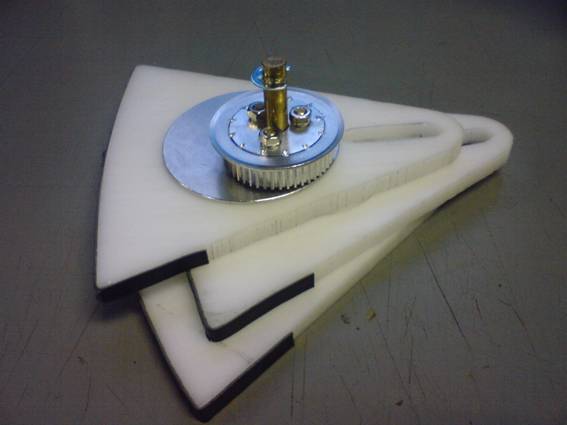
↑足のユニット1つ分。今回は5mm厚のPOM板を用いた偏心スライダクランク(偏心カム)を採用した。カムはスプロケットに直結しており、前後の動力をタイミングベルトで伝達する。スプロケットの下のアルミ板は足パーツの抜け防止のためのもの。

↑反対側から見た写真。仕組みは普通のスライダクランクとあまり変わらない。足パーツの穴の直径は40mmで、ホールソーを使った。ホールソーを使うときには素早く穴あけをしないと穴の断面が熱で荒れてしまうので注意が必要。板の両側から素早くあけるのが良いと思う。


↑偏心カムの構造。120度位相の偏心カムである。それぞれのカムはすべて同じ物で、スプロケットごと3本のM3ネジで固定してある。普通のクランクと比べて「位相がずれない・強度が高い・層の数を増やしやすい・足のユニットが薄くなる」などの利点がある。中央のシャフトが貫通しているので、軸がずれないのも良い。
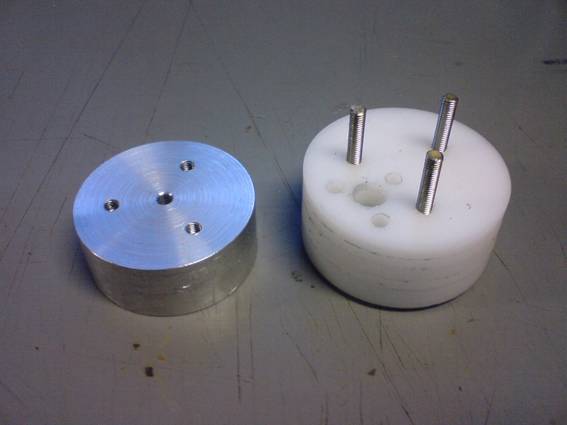
↑偏心カムの制作方法。 左のアルミのパーツにはタップが切ってある。 これにカムをまとめてネジ止めし、旋盤で直径40mmに加工する。 POMは旋盤やフライス盤での加工性に非常に優れており、苦労はないだろう。 ただし、肉厚のPOM板にドリルで穴を開ける際にはできればクランプでの固定が望ましい。 POMがドリルに食い込んで部材ごと回転し危険である。 先に足パーツを作っておき、直接当てながら微調整すると良いと思う。

↑電装系。 サーボはフタバのS3003、アンプ(モータードライバ)はタミヤのかわさき公式アンプである。 今までのロッドを用いた仕組みから、直接アンプのボリュームの軸をサーボの軸に固定する方式に改造した。 標準で付いてくる固定パーツはネジ一本での固定のため不安定であった。 また、ロッドがうまく動かなかったり、むき出しのため衝撃に弱かった。 今回は不完全ながら多少の改善に成功したと思う。
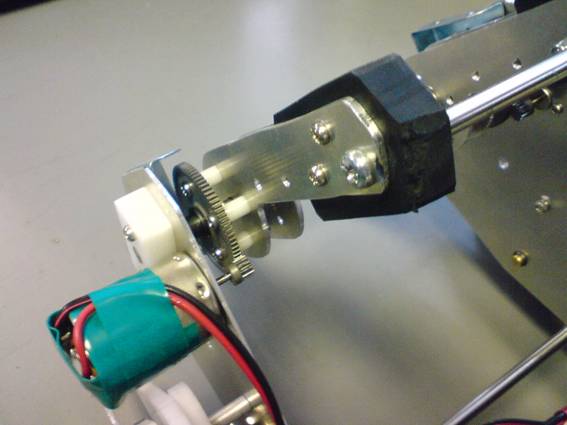
↑アームの構造。 今年から大会で使用可能なモーターは380クラスに限定され、それによりアームに複数のモーターを取り付ける事も珍しくなくなった。 そのため、380モーターを2つ搭載した。 ギア比は6.7:1と軽く、非常に高速でアームが回転する。 相手の機体やフィールドの破壊を防ぐため、厚さ10mmの合成ゴムをアームの先端に取り付けてある。 しかし、トルクが足りず、相手をひっくり返すことは難しかった。 結局、試合で相手の電装系カバーを吹き飛ばし、大会側から注意を受けてしまった。
3.反省・感想
以下の文章は去年の自分の報告書から引用したものである。
~中略~
重要なのはアームであり、足はある程度の性能を持っていれば後ろ足だけでも十分であると感じた。 やはり設計を十分に練りこみ、試作機を作るぐらいの姿勢で挑戦しないといけないだろう。』
結局、教訓は生かされなかった。 今年もスケジュール管理に失敗し、試合直前にマシンが完成、第一試合が初操縦という体たらくだった。 マシンの多くの問題点は事前にマシンが完成していれば修正可能なものばかりであった。 しかし、製作の遅れから、試走会はおろか部内戦にも参加できず、注文したパーツが届いたのは大会前日であった。 もはやマシン云々ではなく自分の大会に対する態度が問題であると感じた。
最後にこの報告書をご覧いただき、ありがとうございました。