モタやき
モタやき
製作者名:山崎彰一
かわさきロボットでは複雑なリンクを使って速さを追及するよりも、シンプルで安定した足に攻撃範囲の広いアームを持ったマシンのほうが有効なのでは?という理論に基づいて設計しましたが…アームが作れませんでした。
大会前日の深夜から作り直したアームはおそらく大会一しょぼかったです。
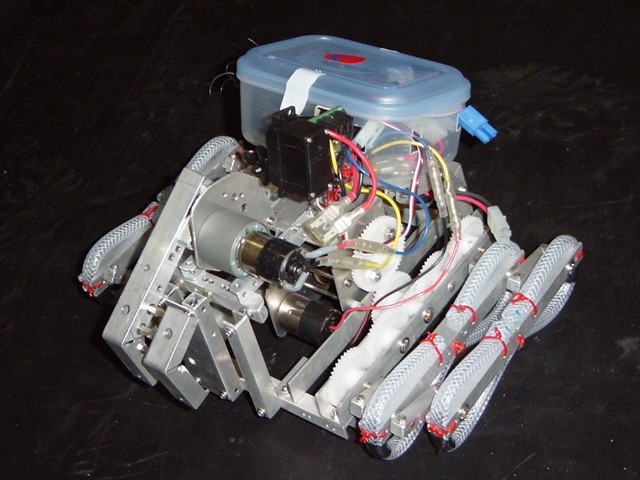
タイヤのようなグリップ力を持った足を作ろうと東急ハンズを探索して思いついた足です。
実際そこそこのグリップ力が発揮されたためか2750グラムという軽量ながら相手と対等に押し合うことが出来ました。
15*15のパイプに東急ハンズで買ってきた外形11mmのホースを縛り付けました。
ホースに穴を開け、ねじで固定するのは強度の面で不安だったのでワイヤーで縛り付けています。
予想以上にワイヤーが重かったので釣り糸などで固定するとより軽量化できそうです。
足はギアを使って回転数を下げていますが、マシンの幅を広くしてまでやる必要はなかったです。
そのためにマシンの横幅が25cmを越えてしまい横長のマシンになる羽目に…。
ごめんなさい。
細かい設計までしてから作りましょう。思いつきで部分部分作っていくと第2、第3のモタやきに…。
予選1回戦 相手走行不能により勝ち
予選2回戦 見事にひっくり返され負け
敗者戦2回戦 押さえ込み一本により勝ち
敗者戦3回戦 正面からの真っ向勝負!接戦の末転倒で負け