かわさきロボットコンテスト報告書
かわさきロボットコンテスト報告書
一年生チーム テオイちゃん1号
キャプテン兼ドライバー:新谷宏
メカニック:山内勇人
エレキ:大作一矢
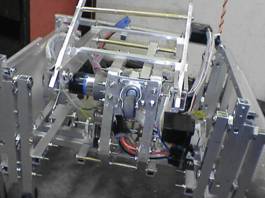
マシンの足機構:180度位相のクランク機構八本脚。機構の調査不足、知識不足の為クランク機構を用いた。かなりの部品数を必要とし、自分達の工作精度が低い為、足機構だけで相当の時間を費やしてしまった。また,鈍足であり、180度位相であるからグリップ力が悪く(少しでもグリップ力を増すために足裏にゴムを取り付けた)スピード、パワーの両面で不安がある。当初、縦長だった機体を旋回性を高める為に横長型にし、一定の成果を得た。
アーム機構:自動繰り出し式のアーム。大会規格の大きさに収める為、アームは折りたたみ式にして試合開始とともに展開するようにした。リーチや相手の機体を横転させるだけの力はあるが、アームは機体の正面のみしか攻撃できないので回りこまれると受けに徹しなければならない(旋回性能が低いため回り込まれたらなす術が無い)。アーム先端部分には真鍮棒を取り付けてあり、相手の機体下部に突起がある場合に引っ掛けることが出来る。なお、最大4本まで取り付けられるが重量の都合上、1本である。

大会の結果:
予選
一回戦 クワガタと対戦。機体の隙間に角を入れられ、投げられて負ける。
敗者復活戦
一回戦 相手が来なかったため、不戦勝
二回戦 Antique-Xtremeと対戦。押し出し負け
新谷の反省点:「最悪アームはモーターに角柱つけるだけで」と言っていたくらいなので、アームは予想外にうまくできたと思う。脚機構は最初に思いついた最も単純で思いつきやすい機構に決まり、その他の脚機構は調べていなかった為に現状の機構に落ち着いてしまった。次回はもっと調査をし、マシンを設計したいと思う。
山内の反省点:各部品の精度が悪く、機構が動かずに手直しを何回も行った為、アームや予備部品に割ける時間が少なくなってしまった。また、脚やアームの機構について知識が乏しく、あまり提案することができなかった。2人に頼ってしまい、負担をかけた。次回までに自身の課題をしっかりこなそうと思う。
最初は歩けるかどうかという(出場が)危険な状態だったが、先輩方に助けてもらい、安定した歩行と相手をひっくり返すだけの攻撃力を得ることが出来た。本当にありがとうございました。
大作の反省点:最初の大会ということで、自分たちの考えた脚機構でいこうと思った。しかし、途中で縦と横を入れ替えたりアームの機構を大幅に変更したりと、行き当たりばったりな感があったのは否めない。ただ、前日には脚機構はほとんど完成していた為、当日の朝はわりと余裕があったのは良かった。
© RUR, 2005.
Do not copy without permission.