2005年度 第12回かわさきロボットコンテストに関する報告書
2005年度 第12回かわさきロボットコンテストに関する報告書

大会当日の写真
○マシン名:黒鉛号
○チームメンバー
・機械兼ドライバー:永田真一郎
・電気兼機械補佐:杉崎覚
○
マシンスペック
・サイズ:縦24cm×横33cm×高さ60cm(アーム展開前)
縦60cm×横33cm×高さ60cm(アーム展開後)
・重量:3.4kg
・動力:マブチ380モータ×4(足回りに使用)、マブチ380モータ75:1ギアド(アームに使用)
○マシン説明
足回りをシンプルにして、強力なアームがあればそれだけで勝てるだろうという考えのもと生み出されたマシン。
もともとのコンセプトが似ていたうえに、ホースを使えば地面との摩擦力を十分に得られるだろうという発想まで一致したせいもあって、外見はモタ焼き(2003年度大会出場)に酷似したものになっている。
このマシンの特徴は名前の由来になっているCFRP(カーボン繊維強化プラスチック)を用いた長いアームと、一つの足回りに2つのモータを使って駆動していることである。(図1、図2参照)
パーツ数もかなり少ない構成になっていて、電気系統を装着していない状態では非常にシンプルな見た目なのも特徴といえば特徴。
山を登らなければならないことをすっかり忘れており、そのことを考えずにとにかく車高を低く作ったために低い山すら登ることが出来ないという重大且つ致命的な構造的欠陥を持つ。
・アームについて
このマシン、最初は破城槌のように強力な突きを相手にお見舞いするアームを構想していたのだが、理想を実現できる機構が思いつかなかった上に時間がなくなったため、糸を使ってアームを上下させて相手を持ち上げる機構に至った。
メインアームに使ったCFRPは自作竿のために釣具屋で売られているものを使用した。非常に軽く、強い素材であるため、アームの材料として理想的である、と言う理由で使用。カーボンパーツを使ってみたかったという製作者の我侭も多分に含まれている。
メインアームのリーチ自体は非常に長いが、これをかいくぐられるとどうしようもなくなるため、隠し腕なる短いサブアームが取り付けることで、メインアームが跳ね上げられても根元にあるサブアームによってフォローできる形になっている。(図3、図4参照)
アームと動力とを繋いでいた糸は、釣りに使われる強力なもので、線径が0.3mm弱でありながら27kgもの引っ張り耐力を持つ。元来岩にこすれることを前提に用いられる糸であったため、大分痛みはしたが、大会中に切れることは一切なかった。
今大会中唯一糸によって動作するアームで、その動作は非常に遅く、高速化が進んだ今大会では殆ど飾りに近かった。
結局アーム自体が勝利に貢献することはなく、そのリーチによる牽制効果だけで試合を展開することとなった。
なお、構造的な欠陥で、メインアームで相手を持ち上げようとすると、こちらが前のめりに倒れてしまう。
・足回りについて(図2参照)
歩行方法は至って単純で、180度位相のクランクによるものである。
歩行時の衝撃吸収性とグリップ力を持たせるために足の裏にホースを履いた形になっている。
前日までホースの剛性のみで立たせていたため、歩行中にホースが歪み、前に歩いているのに横に向かって歩くと言う現象がおきてしまい、大会前日に急遽パーツを作って解決した。
この足回りを動かしているギアボックスは主催者側から販売されるものではなく、自作したもの。片方の足回りのギアボックスに2つのモータを取り付けたものになっている。
押し合いになった際、最終的にはトルクが物を言うだろうと考えてのものである。しかし、180度位相のクランクによる歩行機構では地面への動力伝達効率がとても悪く、力を発揮した場面は見られなかった。
このギアボックスを製作するにあたって、製作期間の半分以上がこれに費やされている。
原因は製作者自身の工作精度の悪さ。今考えると2週間をこれで無駄に時間を使った感じがある。
ギア比は、メトロノームを使って歩くリズムを数値化してこのぐらいのスピードがちょうどいいだろうという回転数を割り出した上で決定した経緯がある。自分としてはこのメトロノームを使って歩くリズムを具体化する方法は役に立った。
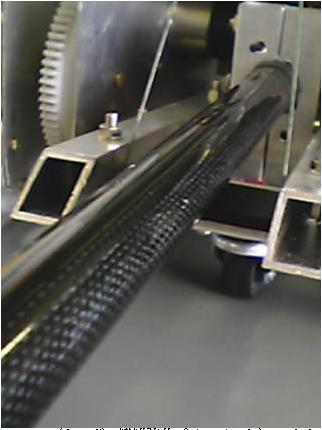
図1、CFRP(カーボン繊維強化プラスチック)のメインアーム
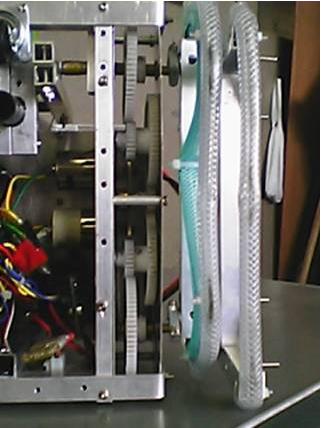
図2、足回り
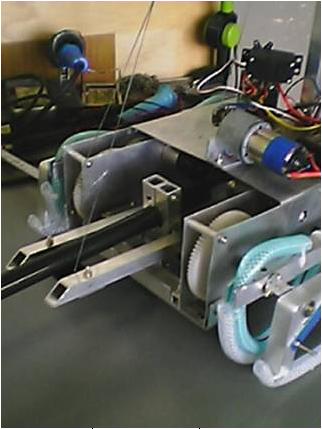
図3、このアーム実は・・・
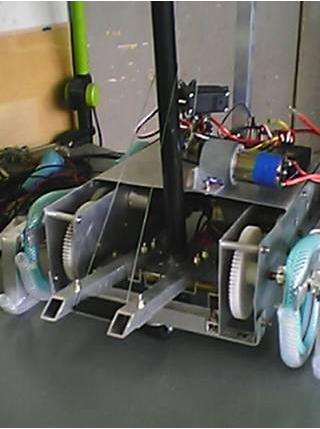
図4、メインアームが跳ね上げられて懐にもぐられてもサブアームで相手を刺すことが出来る
○試合結果
・予選一回戦目(vs本土決戦一億玉砕)→Win
殆ど何もしないうちに相手のアームに押し出されたかのように見えたが、相手側の暴走でこちらのスタートブロックに触れてしまい、相手側の反則によって勝利。
はっきり言って試合とは呼べないものだった。
・予選二回戦目(vs Baroque GG)→Lose
アームのリーチによる牽制を盾に攻めたが、機動力差によって横を易々と取られていまい、相手に投げられて敗北。
投げられた際に、派手にひっくり返るも損傷箇所なし。
・敗者復活二回戦目(vs JUMBO7号)→Win
非常に小型なマシン相手に攻めあぐねた結果時間切れとなるも、相手側が試合前の整備に時間をかけすぎたためポイント優勢となり、こちらの判定勝利。
山を登ることが出来ないながら長いアームで捕まえに行こうとするこのマシンと、山の間を抜けて逃げることは出来きてもこちらのアームが邪魔でなかなか近づけない相手マシンによる、互いに攻め手を欠いた試合展開はなんとも形容しがたい雰囲気に包まれた。
予選一回戦目に続き、幸運による勝利。
・敗者復活3回戦目(vs らんちゅう☆ぶらいまる)→Lose
押し合いの末、こちらの位置取りミスで押し出されて場外へ。
相手のアームが非力であったために機動力で負けていた割には互角に近い試合展開になり、このマシンにとって最も試合らしい試合となった。
サブアームを使って持ち上げられるチャンスが何度かあったにもかかわらず、操縦練習不足からくる操作ミスで何度もふいにしてしまったことが悔やまれる。
押し出された際、場外にまで転げ落ちて地面と思いっきり激突するも無傷。
○大会が終わっての反省
・良かった点
構造をシンプルに出来たため耐久性が高く、大会中に故障や破損することを一切起こさずしっかり動作し続けた。
前回の知ロボの反省から詳細な仕様を事前に決めつつ製作し、行き当たりばったりな製作から脱却した製作ができた。そのため、工作失敗などによる時間のロスを除けばかなり短い製作時間でマシンを完成することが出来た。
位置取りの工夫でマシンの性能差をある程度埋めることが出来た。
・悪かった点
電気屋である杉崎君といろいろ話し合っていたが、自分は7.2Vでマシンを動かそう、杉崎君は14.4Vで動かそう、という認識の違いが本番1週間前になるまで気がつかず、それが原因で杉崎君に対して結果的に長い間無駄な仕事をさせてしまった。
パーツが少ない予定だったことから8月に入るまでマシンの製作日程をかなり甘く見てしまい、それが原因でマシン操作の練習時間を潰してしまった。
上記のこととリンクするが、ギアボックスを製作するに当たり、自分の工作精度の悪さから2週間以上かけてしまった。
相手マシンの動く速さをどのくらいなのか全く認識しておらず、自分の思い込みで足回りとアームの速さを設定したこと。この辺りは、調査不足とも言い換えられる。
設計段階で、構造的な欠陥を見抜くことが出来なかった。
○感想
欠陥だらけのこのマシンにしては2勝2敗と(幸運が続いたとはいえ)出来すぎた結果のように思う。
アームにおけるリーチという要素は試合展開においてかなり重要なのだと思った。そして、アームのもつ瞬発力は勝敗を決することにおいて最重要なのだと理解した。
機動力に関しては自分がコンとロールできる範囲内であれば移動速度は速いに越したことはないが、それよりも旋回性能を重視すべきだと思った。
機械的、電気的な故障を起こさずに全試合このマシンの持てる力を出し切れたので、そこの部分においては1年のときに参加した知ロボのころより成長できたのかなと思う。
ヘッケンリンクを利用した高速高機動マシンが多数を占めていたが、その殆どがせっかくの機動力を生かせて無いように見えた。とくに、自機が速すぎて反応と操作が追いつかずに場外に飛び出す光景を見たりすると正直自分の中のなにかが冷めてしまった。
そんな中独創的な機構をもつマシンなどを見るとわくわくした。
アームと足回りを研究してより良いマシンを作り上げて次回の大会に臨みたい。
© RUR, 2005.
Do not copy without permission.