2006年 かわさきロボコン報告書
2006年 かわさきロボコン報告書
電気電子工学科2年 大作一矢
●対戦結果
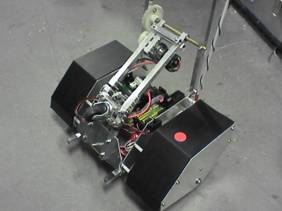
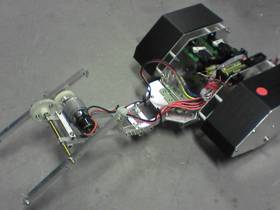
マシン名:「TAT1号」
一回戦: 左足が動かず、敗北。原因はギアヘッドに取り付けたKHK-DS1ギアの空転。
敗者復活戦 一回戦:勝利。
敗者復活戦 二回戦:勝利。
敗者復活戦 三回戦:右足にもトラブル。原因は左と同じ。しかし、相手がこちらに接触しに来てくれたおかげで3分間を乗り切る。その間に何度も修理を申請し、芋ネジを締めなおすが効果なし。延長戦の3分間も右足が動かないまま乗り切り、コイントスで勝利。
敗者復活戦 四回戦:KHKギアを電動ドリルでギアヘッド軸に貫通固定して勝負に挑んだが、衝撃でバッテリコネクタが脱落し操作不能に。スタートゾーンから出られず敗北。
●反省
前年のかわロボの後、足機構は「120度位相のスライダクランク」と決めていた。しかし上下移動0にこだわりすぎて、足先形状の設計に時間を食いすぎてしまった。スピードコントローラやギアードモーターの確保もしていなかったため、実質一週間ほどしか制作期間が取れなかった。そのため、足の不調の原因を洗い出す事が出来なかった。どの大会でもそうだが、やはりスケジュール管理を徹底する事が非常に重要だと感じた。
KHKギアの空転の原因は、中に内径6mmの真鍮パイプを通した事で、中の真鍮パイプと外側のギアの芋ネジの穴がずれてDカットからネジが離れてしまった事が原因のようだ。また、動力伝達のためだけにギアを3枚も噛ませている為に抵抗も大きかった。芋ネジはやめて締め付け固定にし、ギアヘッドに足機構を直付けするほうが良いかもしれない。
●その他
去年、今年と大会に出てみて、やはりマシンは大型化の傾向にあると感じた。もちろん小さくても強いマシンはいるが、大きいと坂の登坂能力が上がり、ひっくり返されにくくなる。ただ、倒れこみ方式は失敗の危険もある。また、サーボ式のスピードコントローラを使用しているチームはかなり少なかった。できれば、来年までにマイコンとモータードライバを使ってスピードコントローラを自作したい。
機械的な事以外では、やはり操縦訓練が必要だと感じた。試合を見ると、やはり動かし慣れているマシンが勝っていた。難しいかもしれないが、フィールドを製作できれば一番良いと思う。
© RUR,
2006.
Do not copy without permission.