かわさき競技大会2006報告書
かわさき競技大会2006報告書
当日の写真
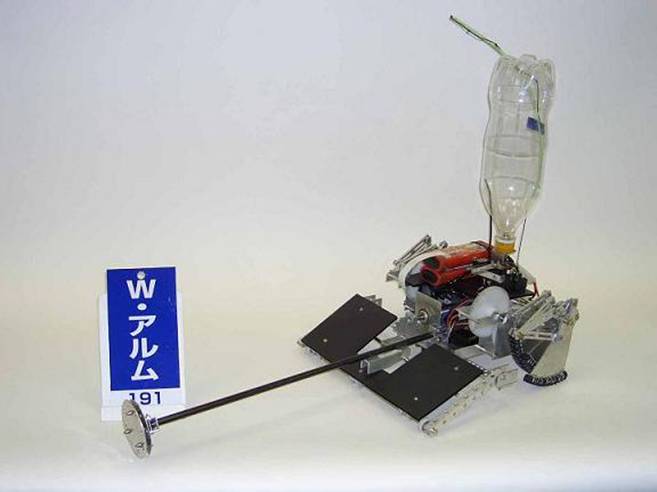
・マシン名:W・アルム(ダブル・アルム)
・チームメンバー
機械兼ドライバー:永田 真一郎(機械システム工学科3年)
機械補佐:片桐 正人(機械システム工学科1年)
○マシン全体について
前回の反省を生かし、上下振動を少なくできる脚機構と高出力のアクチュエータを使用したアームを搭載し、去年から大幅なスペックアップを狙ったマシン。
リーチを確保するためのアームと近接用アームを備え、特に近接用アームは自機の幅とほとんど同じという幅広さで攻撃が可能で瞬時に相手を倒せる強力な出力を持つ。
本番当日の早朝にクランクの根元が折れて走行不能になってしまい、何も見せることができずに幕を下ろすこととなってしまった。
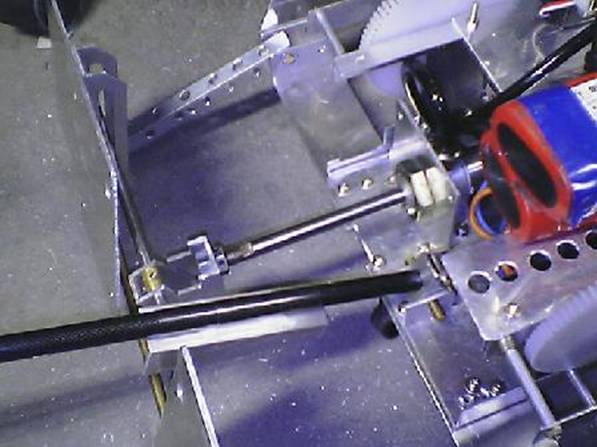
○足回りの機構について
120度位相のテコクランクの亜種を採用。
パーツ数が多く、今回の製作で最も時間を割いた部分であり、問題を起こした部分。
上下の振動が殆ど無く、動作すると並んだリンクが規則正しく動き非常にメカっぽい動きを見せてくれる。(動画参照)
足先には防振ゴムを針金でつけることによりグリップ性能を高めている。これが中々に強力で、部室の廊下で行った試走でスリップの類を起こすことはなかった。
マブチ380モータを14.4Vで回し、ギア比60:1の自作ギアボックスで動力を取り出している。
足回りのアップ
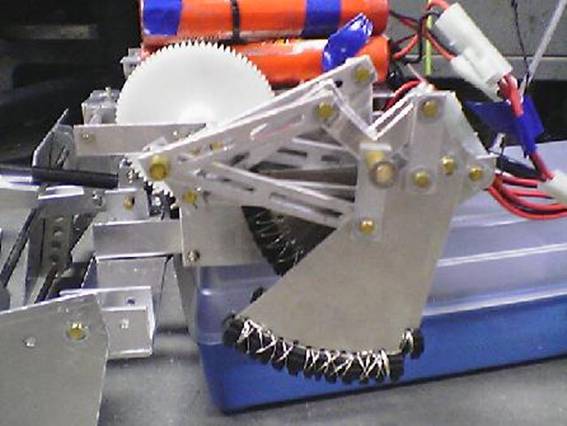
○アームの機構について
空圧シリンダーを用いて1つのアクチュエータ(動力)から2つのアームを操ることができる少々変わった特徴を持つアーム。2つのアームによって遠近に対応した立ち回りが可能。
前方に伸びた第一アームは去年に続きカーボン繊維強化プラスチック製で、相手と押し合う際になるべく本体と離れたところで押し合うのが主な役割。
空圧シリンダーを伸ばすことで上方へ跳ね上がることができ、相手本体を転ばすほどの威力こそ無いが相手が折りたたみ式アームだった場合、アーム部分を跳ね上げることができる。軽量(約2kg以下)な相手であれば一応体勢を崩すこともできる。跳ね上がると空気タンクであるペットボトルに跳ね返って一瞬でもとの位置に戻り、非常に動作の隙が少ない。
先端にはタングステン合金製の釣り用重りを使用して引っかかりとなる突起を作り出しているが、これは相手との接触回数が多い部分を強化する意味以上に製作者の趣味が盛り込まれた結果である。
一見、アームには見えない第二アームであるが実はこれが相手と決着をつけるためのものである。
空圧シリンダーを伸ばすことで坂の勾配を一気に上げ、坂の上にいるマシンを倒す仕組みになっている。
第一アームによってアームを跳ね上げ、全長が短くなったマシンをこの第二アームで転ばす作戦であったが、今思うと最初から大型の倒れこみ式のマシンに対してはさほど威力を発揮できなかったと予想される。

シリンダーを縮めた様子
シリンダーを伸ばした様子

第一アームは主に相手との押し合いに使う

バランスの悪い相手ならば転ばすことも可能

相手と絡み合っても

第2アームで相手を転ばせることができる
○結果
予備予選
走行不能により棄権
○良かったところ
設計自体を去年のかわさき大会が終わってから開始しており、設計自体を十分に煮詰めることができ、性能自体は去年製作したものより大幅に上がった。
○反省点
全ての失敗は書類作成時から始まっていた。書類にアームや脚の動作を書き込むのをすっかり忘れたまま提出してしまった。気が付いて修正のメールを送ったが予備予選に回されてしまった。このときに1日作業時間が減っただけだと認識したのも大間違いで大失敗だった。
製作期間中、サークル活動とは全く別の関係で非常に不愉快な思いをする羽目に遭ったことで全てに対して1ヶ月以上やる気をなくした時期が発生。この間全くマシンに手をつけないというありえない行動をとったことが今となっては悔やまれる。
気分に激しく左右される自分をどう押さえつけて机に向かうか、などという子供じみた課題と向き合わなければならない。
徹夜している間、行われたことは寝ぼけた頭によるマシンの改悪だった。自分は徹夜に全く向かないのだろう。もう徹夜での作業は一切しないことにする(泊り込むにしても睡眠は取る)。
○感想by永田
去年の反省を生かし、2回目のかわさきに競技大会に臨んだが、結果は棄権。出場すらできていないという個人的に過去最悪の結果。
原因は本番当日早朝出発直前最後の試走中にクランクが破損し、それに伴い動力軸が大幅に削れたこと。本来これは1ヶ月前にやらなければならなかったことだというのは分かっていたが反省の部分にもあるように、製作とは全く関係の無いところで起こした問題をここにまで持ち込んだ自分の責任である。といっても、よりにもよってこのタイミングは無いだろう、という思いも多々あったりする辺り自分の未熟さを自覚してしまう。
今年のかわさき競技大会のキーワードは「超」高速移動と常時回転式アームといえたと思う。流石に13回ともなると、定番ともいえる形状が形成されており殆どのマシンが似たような仕組みの脚機構とアーム機構を有していた。
投入技術と経験の差がマシンの間で著しく出ており、正直なところ参加回数と投入金額あたりを基準にしてクラス分けを行ったほうが面白くなると思う。こういった対人戦は実力が近いもの同士が当たることが一番面白くなるのだから・・・・といっても、常連さんたちの魅せてくれる技術との交流ができる場である側面が失われる恐れがあるなど、いろいろと難しいことは理解しているがどうにかならいだろうか。
今は、どうして1年の時からこの大会に参加しなかったのだろう、と後悔の念で頭が埋め尽くされている。来年、もし時間があるならばこのマシンに改良を加えてリベンジしたい。
○感想by片桐
今回の大会で私たちの班はB予選から出場しましたがマシンが動かず、結果、棄権となりました。この大会で分かったことはマシンの加工と計画予定通りにマシンを作り上げる難しさだ。加工に関しては、ポンチを打つ場所とドリル盤での穴あけの精度の悪さが目立った。また、計画予定通りに作業が進まず完成日が遅れ、マシンの作動実験がなかなかできなかった。
このロボコン大会のマシンにおいて足がひとつの重要点である。その足が止まる、故障すると何もできない。そのため、足は高精度のものでなければならない。加工、つまり材料の穴あけ、切り出し、を正確に行うことが必要となる。両方とも、けがき線のあとに正確につけること、また穴あけの場合は、ドリル盤でポンチのあとの中心を正確に空けなければならない。この足の精度が出せなかったため、足は動かなかった。
計画予定を決めてそれに沿ってマシンを作り上げていくことでトラブルが発生したときにも対応できるようにしなければならない。しかし、今回は夏休みに入ってからあわただしくなり、大会前日に起きたマシントラブルにも対処できなかった。やることに対して常に期限を決め完成予定日(3,4週間前として)の1,2週間前に仕上げられるようにすれば、マシン改良、またマシントラブルにも十分対応できる時間が取れるはずだ。
© RUR,
2006.
Do not copy without permission.