2007年川崎ロボット競技会報告書 – R.U.R.
2007年かわさきロボット競技会報告書(阿部班)
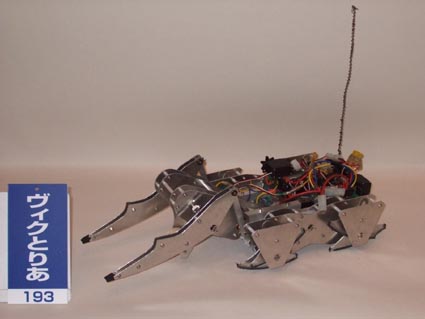
マシン名:ヴィクトリア
製作者:機械システム工学科2年 阿部静佳 片桐正人 板垣浩文
 |
 |
図1.大会会場控え室にて
1.マシンの機構
・ 脚機構: 180度位相スライダークランクを4脚搭載。足先形状はCADを
用いて、インターネット上で紹介されている足先形状の設計の仕方
に従って作成。(http://fuver.sub.jp/arekore/kawarobo2/kawarobo2.html)
足裏には当初シリコンチューブを使用していたが、試走会に参加した際にグリップ力に問題を感じたため、最終的にはゴムシールを使用した。
・ 腕機構: 四節てこクランク機構を使用した。1.5㎜厚のアルミ板でスペーサ
を挟んでいる。地上約300㎜まで持ち上がる。動力は300:1
540ギアードモーターで、歯車を組んで375:1まで減速している。
ギアボックスが地面に接する部分は木製の従動輪を使用し、軽量化
を図った。
・ バッテリー:7.2Vニカド電池を2本直列で使用。受信機用電源には単三
マンガン乾電池を4本使用。マンガン乾電池を使用することで
軽量化を図った。
2.大会結果:
1回戦:対ビッグブルー。一本勝ち。
2回戦:対フレイル。一本負け。
敗者復活戦:敗退。
3.反省:
①試走会で山を越えることが出来なかった。これは従動輪の直径が小さすぎた生だったのが原因のようだった。設計の時点で気づけるとよかった。スピコンの重量を考慮に入れるのを忘れてしまったためマシンの重量オーバーに苦しんだ。必死の肉抜きの甲斐あって300グラムの減量に成功したものの、大会当日に5gのオーバーを指摘されスピコンをこうかんするというトラブルがあった。協力してくださった大作先輩に感謝いたします。余裕を持った重量設定が大切ということを実感した。
②マシンを8月上旬までに完成させ試走会に参加するという目標は達成された。
試走会に参加することで問題点が明らかになり、本番までにいろいろと修正できたことは大変有益であった。
③特に大きく損傷することもなくバトルできた。操縦練習にもっと時間を使える
とよかった。
Do not copy without permission.