2007年度 第14回かわさき報告書 Valiant – R.U.R.
2007年度 第14回かわさきバトルロボットトーナメント報告書
電気電子工学科 大作一矢
1.試合結果
第1回戦
第2回戦
敗者復活2回戦
敗者復活3回戦
敗者復活4回戦 試合開始直後に後ろに転倒し、負け
 2.マシン解説
2.マシン解説
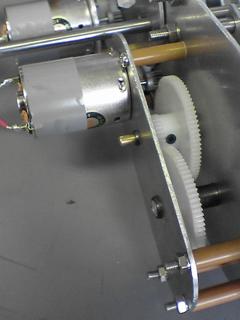
●足機構:ギアボックス
今回はギアヘッドを使わず、KHKのモジュール0.5のギアを用いてギアボックスを自作した。 380モータの軸径は2.3mmなので、LS0.5-12の穴径2mmに合うように軸をやすりで削ってある。 写真では80と28のギアをM2ネジでとめているが、丸棒をピンにしたほうがいいだろう。 ギア比は19.05:1。
20:1程度のギア比ならばギアを使って自作したほうが安上がりである。(DS0.5-80が230円、同28が145円、LS0.5-12が150円で1ユニット755円) 安く済む以外に利点があまり無いのが欠点か。
大会で故障しなかったのが良かった。
 ●足機構:全体
●足機構:全体
今回は足の小型化を目指し、120度位相の四節リンク(ヘッケンリンク?)を用いた。 四節リンクのほうがスライダクランクよりも高さが抑えられるためである。 リンクの部分がスムーズに動き、かつぶれないようにするのに少し苦労した。
 ●足機構:クランク・足
●足機構:クランク・足
今までは6×10mmのアルミ材と6mm真鍮棒でクランクを作っていたが、今年は2mmアルミ板と12mmアルミ丸棒でクランクを作成した。 今までよりもクランク部分が薄くなり、位相がずれにくくなるのが利点である。 欠点は非常に作りが複雑になることである。 アルミ丸棒のシャフトにタップを切ってネジを入れる構造だが、このネジが頻繁に折れてしまった。
 足は厚さ10mmのジュラコン板を使用。 足が厚いのでぶれにくく、滑り止めのゴムを張るスペースも広いのでグリップも期待できる。 エンドミルでの切削性は良好だが、普通のドリルだと食い込んでしまい、部材ごと回転して危険だった。 また、大きな径の穴を開ける際は、穴が縮むので注意が必要である。 ステップドリルや、ホールソーを用いたほうが良いだろう。
足は厚さ10mmのジュラコン板を使用。 足が厚いのでぶれにくく、滑り止めのゴムを張るスペースも広いのでグリップも期待できる。 エンドミルでの切削性は良好だが、普通のドリルだと食い込んでしまい、部材ごと回転して危険だった。 また、大きな径の穴を開ける際は、穴が縮むので注意が必要である。 ステップドリルや、ホールソーを用いたほうが良いだろう。
比重が重い。強度は十分だと感じた。側板には使わないほうが良いと思う。
 ●足機構:サスペンション
●足機構:サスペンション
見ての通りの機構で、バネが一本入っている。 バネがこれ以上縮まないので、足ユニットもこれより下には下がらない。
地味だが、確かに登坂能力は上がったように感じた。

●本体の構造
120度位相四節リンクのユニットを4個つなげてある。 前後のユニット間にはサスペンションがついており、後ろのユニット同士で左右と接続されている。 左右をつないでいるのは6mmステンレスパイプで、中に4mm真鍮棒を通して両端をナットで固定している。 アームユニットもこのステンレスパイプに固定される。
各ユニットにモータが搭載されているので、足が故障しても試合の続行が可能である。 写真では右前足がホイールに変わっているが、これは試合中にクランクが破損したためである。
電装系の固定方法がお粗末だったのが悔やまれる。
 ●アーム
●アーム
540モータに75:1のギアヘッドをつけ、減速してある。 作りは非常に貧弱で、パワーも足りなかった。 試合前には上に跳ね上げることで収納する。
アームにはギアヘッドを使わず、自分でギアボックスを組むのが良いと思う。 また、モーターも540では少々力不足かもしれない。
3.反省・感想
今年もスケジュール管理に失敗してしまい、当日の出発5分前まで製作、会場で完成させるというお粗末ぶりだった。 マシンの設計は比較的良かったと思うが、アームの決定力不足は相変わらずだった。
来年から高さ制限が設けられるからか、倒れこみタイプのマシンが多かった。 上級者と初心者の格差がより拡大し、技術・資金・時間をある程度つぎ込まないと勝つことが難しい大会になってきていると感じた。 また、確かにタイヤ足は早いが、スライダクランクだから勝てないというのは全くの間違いであると思う。 重要なのはアームであり、足はある程度の性能を持っていれば後ろ足だけでも十分であると感じた。 やはり設計を十分に練りこみ、試作機を作るぐらいの姿勢で挑戦しないといけないだろう。
Do not copy without permission.