2008-かわさきロボット競技大会報告書(ダックスふ~た) | R.U.R.
2008年度 第15回かわさきロボット競技大会報告書
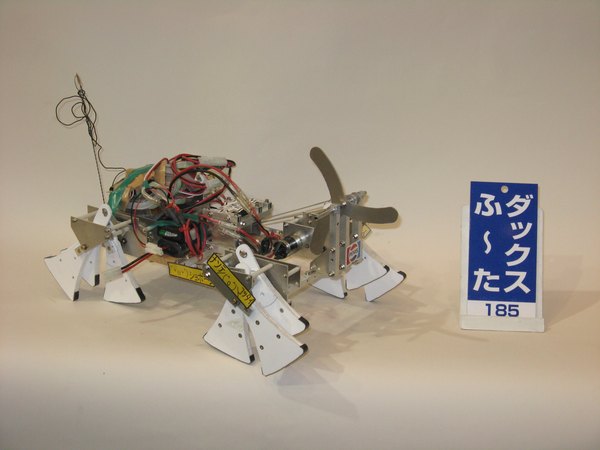
マシン名: ダックスふ~た
伊藤 雄哉(キャプテン兼メカニック兼ドライバ)
岩崎 透
マシン解説
1.目的
昨年よりさらに起伏が大きくなったフィールドでも高速で走破できるように足を大きめに設計した。また、R.U.R.内で倒れこみ式のマシンがなかったので、試しに作ってみた。
2.取り組み
■足機構
動力伝達機構は自分の趣味で今年もてこクランクを採用した。また、足先は設置面積を大きくするために3mm厚のプラ板を三枚重ねにして足一枚とした。それらに東急ハンズで買った滑り止めシールを貼ると、かなりのグリップ力が得られたので非常に満足している。脚は三枚足である。
タミヤのギアボは使用せずに自作した。ギア比は22.8:1である。
良い点
クランクを大きくし、足の振り上げ幅も大きめに取ったため、山の乗り越えは 予想通りスムーズに行えた。そのため、フィールドを広く使った攻撃が可能となった。それにより車高が高くなってしまったが、とくに不都合を感じることはなかった。あと、スプリングピンを使ってみたかったのでクランクと軸をつなぐ所に使用した。これは、安価なうえに丈夫で、見た目も格好よく出来たので、後世の人たちにもお勧めしたい。
改善点
ヘッケンリンクの軌跡は左右対称ではない。これを逆手にとり、前も後ろも同速で動けるように前脚と後脚を逆に付けた。(揺動リンクが付く軸が前後どちらも外側になっている。説明しづらいな、前脚と後脚がマシン中央を挟んで線対称になっていると書けば伝わるか)。そのために推進力を十分に発揮出来なかったのではないか。敗者復活戦で押し合いに負けたのは、このためであったのではないか。この点は学祭に向けマシンを作り直す際にテストするつもりである。報告書の提出期限を勝手に決められてしまったので、ここにその結果を書くことは出来ない。恨むなら期限を決めた奴を恨め。
前述のギアボだが、試合後に野良試合をして際に一つ目に作ったものを除いて、三つ全て大破した。ギアボのような精度必要とするものは時間をかけ、じっくり取り組んだ方が良い。徹夜明けなど以てのほかである。
■アーム
結果として最初の設計とは大きく異なるものとなった。動力伝達はその場のノリでウォームギアを使用した。ギア比は20:1。また、やってみたかったというだけの理由でタイミングベルトを使用した。
良い点
構造がシンプルだったため、破損することは無かった。相手マシンに引っ掛け易いように反りを付けたためにどっからどう見てもチ○コになった。
改善点
ウォームのギアボも精度良く作るべきである。徹夜明けなど以ての(略。
■スピコン
マイコン制御のドライバ。お値段異常。
良い点
プログラム可能。
改善点
見た目。
■全体
以上にある通りやってみたい事を全て詰め込んだわりに、重量は3170gしかなかった。それならもっとまともなアームを作るべきでした。
上記の写真のように電装系は全てガムテ固定である。だっさwww
| ダックスふ~た | ||
|---|---|---|
| 諸元 | 重量 | 3170g |
| 最大直進速度 | 不明 | |
| 電装系 | 動力源 | 7.2V(NiMHバッテリ6セル) |
| メインモジュール | 手作り | |
| ボディ | アルミと発泡プラの塊 | |
| 足回り | ヘッケンリンク機構、左右独立操舵 | |
| モータ | タミヤ 380K75 | |
| 動力伝達 | 教育樹脂平歯車 減速比22.8:1 | |
結果
・予選第一回戦(対 K314-六式) 敗北
・敗者復活戦第一回戦(対 ソヌマス二号機) 敗北
感想
・伊藤
今年から全高700mmと自由回転のモータは380のみという制限が新たに加わった。昨年に比べ確かに倒れこみ式のマシンは減った印象はあるが、その他は大きな変化はなかった。
マシンの完成が当日の深夜だったため、大して練習出来ずに本番を迎えたために全力を発揮できなかったのが、残念でならない。二年連続全敗は自分でもどうかと思う。でも仕様がないね。早く一勝を挙げたい。あと、フィールドもそろそろ作りたい。