舞風報告書
舞風報告書
マシン概要

|
マシン名 |
… |
|
舞風(まいかぜ) |
|
マシンサイズ |
… |
|
約130×100×300〔mm〕(アームを上げた状態で) |
|
マシン重量 |
… |
|
約1300〔g〕 |
|
CPU |
… |
|
H8-3664N |
|
モーター |
… |
|
KH42EM2-801(日本サーボ;ステッピングモーター) |
|
バッテリー |
… |
|
単三型ニッケル水素充電池(1.2V、2500mAh×12本) |
|
センサ |
… |
|
可視光センサ×4、PSDセンサ×2 |
|
製作費用 |
… |
|
約25,000円 |
|
製作期間 |
… |
|
約4ヶ月(下調べ1ヶ月、ハードウェア1ヶ月、ソフトウェア2ヶ月) |
|
出場大会 |
… |
|
学生大会2005(サーキット、マウス)、 |
|
戦績 |
… |
|
学生大会2005(サーキット):0’37’360 |
説明
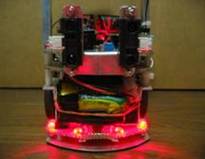
機械屋の自分が始めて(一人で)手がけた自立型ロボットです。一区画ごとに壁の有無、缶の有無を確認、記録しながら走行します。アルゴリズムは拡張左手法に缶処理を加えただけのものとなっています。ハードは特に2003年の同大会で優勝したMINTに多大な影響を受けています。
|
|
以下、各部分ごとに見ていきましょう。 まず、センサ周りですが、壁用のセンサにはマイクロマウスで有名な森永さんの回路をそのまま用いています。缶用のセンサにはシャープのPSDセンサを2個用いました。初めはMINTと同じように前方と右側にそれぞれ1個ずつ付ける予定でしたが、センサの指向性の問題から2個とも前方に配置して信頼性を上げています。 CPUは初めて手にしたマイコンでもあるH8-3664N(以下Tiny)を使用しています。クリッパーをTinyで動かすというのはわりと珍しく、周りを見渡してもたいていH8-3048やH8-3052を使用していました。Tinyではアームを動作させるサーボ用のPWMポートが足りないのが主な理由です。しかし今回は自費での参加で予算が限られているということもあり、技術的には多少ハードルが高くなるのを承知で挑戦してみました。 足回りについては、ちょっとトルクに余裕を持てるように日本サーボのKH42EM2-801を選びました。ドライバICには東芝のTA8435Hを使用しています。駆動方式はやはりトルク重視のバイポーラです。 |
|
|
最後にアーム周りについて。このマシンのアームはちょっと変わった構造になっています。まず目を引くのが大きな白い板。これはアームを下ろしたときに缶が予定より手前にあったとき、斜面で押し出せるようにつけたものです。そして缶を挟む部分(以下、ハンド)が長く延びているのも、缶が予定より向こう側にあった場合でも缶をつかめるようにするためです。また、目立たないところでは、ハンドの開閉が通常ギヤで同期させているのに対し、このマシンではリンクを使って同期させている、等が挙げられます。
|
大会の反省
今回の大会では結局記録9個という結果に終わってしまいました。これが多いと思うか少ないと思うかは人それぞれだと思いますが、30個以上という全体の缶数から見るとこの記録は少ないと自分は思います。そもそもこのマシンの現状でのポテンシャルですら大会当日はほとんど生かせませんでした。たとえば缶処理を除けば50〔cm/s〕で走行できた、等です。結局当日はかなりの低速でしかも加減速なしの走行というお粗末なものでした。また缶を確実につかむためにつけたアームの板も、缶を押し出せずに結局倒してしまうこととなり、その役目を全うできませんでした。要するに姿勢制御、特に前後方向の制御が甘かったということです。マウスとの大きな違いのひとつでしょう。
また、今回の探索アルゴリズムについても問題があります。先に述べたようにアルゴリズムには拡張左手法を採用しており、これを採用したのは初めてのプログラムでもあったためこれ以上いじれなかった、というのが大きな理由ですが、やはり袋小路を抜ける際など、缶処理の誤差を蓄積してしまったり、何より時間がかかりすぎるという問題があります。より効率的に缶をひっくり返すというアルゴリズムを考える必要があります。
次回の大会へ向けて
先の反省を踏まえて考えると、やはり走行の正確さの追及とアルゴリズムの改良ということになると思います。また、全ては書ききれませんが、たとえばアームにひねるという自由度を追加するとか、旋回時のブレを抑えるためにもう少し重心の位置を考える、なども挙げられます。いずれにせよ今回の記録を超えられるような、何より自分で満足できるようなマシンに仕上げて、次回の大会に挑戦したいと思います。