2007川崎ロボットコンテストふーた班報告書 – R.U.R.
川崎ロボットコンテスト 報告書
文責 青木、伊藤
● メンバー 1年 三塩晃 (キャプテン) 青木健悟(メカニック)
伊藤雄哉(ドライバー) 石島和也(エレキ)
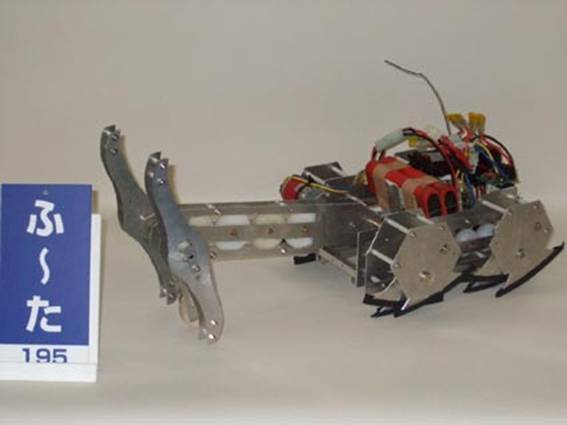
● マシン名 「ふ~た」
●
マシン解説
①
目的
小回りの利くマシンにし、確実に相手の側面を捉え前部に搭載した回転式アームで相手を転倒させられるようにした。また、過去の報告書などから脚周りのトラブルが目立つため、脚部ユニットを別パーツ化させることにより不測の事態にも対処できるようにした。
②
取り組み
・足機構
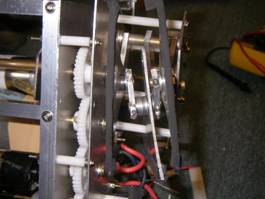
動力伝達機構はてこクランクを採用した。理由は足に細長い溝を掘りたくなかったというだけである。足先には滑り止めゴムシールを貼りグリップ力を増している。そして、足の接地時間が長くなるよう三枚足にした。
良い点
足の振り上げ幅を大きく取ったため、山の乗り越えを容易に行えた。そのため、フィールドを広く使った攻撃が可能となった。
 改善点
改善点
当初、自分が製作したリンク機構には不備があったので、先輩からの指摘を元に正しいヘッケンリンク機構に製作し直した。このようにてこクランク ↑ヘッケンリンク概念図
の十分な知識を得る前に製作を始めたので、無駄な時間と労力を割くことになった。そのためこの脚部の最大の問題点である走行中の上下動を解決できぬまま大会本番を迎えることとなった。マシンの無意味な上下振動はロスを生み走行速度の低下に繋がったので7.2V充電電池の2本直列で対応した。0振動足を設計し、より高度なマシンとする事が出来なったのが今回最大の反省点であった。
 また、クランクを締結するネジが折れる事態が頻発した。これは2mmのネジを使用したためと思われる。ネジの破損それ自体は大きな問題ではないのだが、破損により保持を失ったクランクが地面を蹴る際に回転しきれず、軸を歪めてしまうトラブルを引き起こした。もしこの状況に陥った場合、修理に数時間を要するので試合続行は絶望的であった。これを解決するにはクランクを幅の広いものにし、より太いネジに交換するだけで良かったのだが、ルール規格を越えてしまうためそれは断念し、ネジが破損していないか試合ごとに確認し、その都度ネジを交換するようにした。 ↑歪んだ脚部
また、クランクを締結するネジが折れる事態が頻発した。これは2mmのネジを使用したためと思われる。ネジの破損それ自体は大きな問題ではないのだが、破損により保持を失ったクランクが地面を蹴る際に回転しきれず、軸を歪めてしまうトラブルを引き起こした。もしこの状況に陥った場合、修理に数時間を要するので試合続行は絶望的であった。これを解決するにはクランクを幅の広いものにし、より太いネジに交換するだけで良かったのだが、ルール規格を越えてしまうためそれは断念し、ネジが破損していないか試合ごとに確認し、その都度ネジを交換するようにした。 ↑歪んだ脚部
・アーム
結果として最初の設計とは大きく異なるものとなった。動力伝達はギアで行い、540モータ、250:1のギアヘッドを採用。コンセプトとして長いリーチから攻撃し、かつロボットを規格内に収めるために上げ下げの機構を必要としたので試合前に針金を用い、アームを上げた状態で固定し、試合開始後にアームを回転させることで下げる機構にした。
良い点
構造がシンプルだったため、試合中破損することは無かった。またギア比を変えたことで操作性があがった。
改善点
マシン重量に問題があったため、アームを軽量化した。その際にギアを覆うアルミをギアの並ぶ方向と平行に、軸に対して十分な間隔を空けずに削ってしまったため、アームに回転方向と逆の力がかかった時にアルミが歪んでしまい、ギア同氏に隙間が発生し、空転する事となってしまった。よって、ギアの並ぶ方向と垂直に削るべきであったと考える。
・全体
以上にある通りやってみたい事を全て詰め込んだため、重量が約3800gになってしまった。それを解消するために大幅な軽量化を強いられる事になった。これは本体側面、アーム部側面の肉抜き並びにアーム部従輪の交換で対処した。
上記の写真にあるように電装系が全てむき出しになっているが、保護するためのカバーを作るか、機体内部に格納するスペースを作っておくべきであった。
●
結果
・ 予備予選通過
タイム 一回目コースアウトにより失格
二回目 20″860 103チーム中41位
・ 予選第一回戦(対 Antique-AVENGER) 敗北
・ 敗者復活戦第一回戦(対 GENERAL-no.0) 敗北
・ 特別賞受賞 特別戦出場
●
反省
・ 三塩
設計思想および、胴体設計を担当。反省点としては、バッテリーやスピードコントローラの積載部を考えずに設計してしまったため、胴体完成後電装をするさい苦労してしまった。次回は、電装系の部品を考慮して設計したい。
・ 青木
アーム部の設計並びに製作を担当した。初めての体験であったため右も左もわからず、先輩の教えに従って形にするのが精一杯だった。また作り直しが多く、設計をしっかりと煮詰めてから製作に入らなければ時間、コストの面で無駄が出ることを痛感した。
・ 伊藤
脚部とそれに関わる本体部の設計並びに製作、電装系の実装を担当した。脚部に関しては上下動という難が最後まで残ったものの、当初予定していた機構を包括するマシンを製作出来たことは1年で初参加であることに甘え、概ね可であったと思いたい。
しかし、機体操縦の点に於いて稚拙であった。練習時とは異なるフィールド条件に対応するのに時間がかかり、試合時に相手の動作を見切る事も出来なかった。あげく、アーム逆に回転させる凡ミスまでし、1勝を挙げることも叶わなかった。マシンの操縦を日常行為レベルまで昇華させ、一歩引いた見地で思考する冷静さを手に入れるまで、基本動作の訓練をしていれば、悔いの残る結果にはならなかった筈である。大会に対する認識不足と、最後の最後で自分に甘くなり練習時間を出し渋った自制心の弱さを露呈してしまった。他のメンバーに不甲斐無い成果を共有させてしまった事がただゝゞ申し訳ない。特別賞を受賞出来たことがせめてものお慰みである。
最後になってしまったが、機体製作にあたり有形無形の援助をして頂いた先輩方に感謝します。
・ 石島
今回は一応電気系統の担当ということだったが、それに関しては部の備品を使ったためほとんどやることが無かったので、主にほかの人の手伝いをして基本的な加工の仕方を覚えていた。
実際に大会に参加したほかのマシンを見ていると、何回も開催されている大会ということもありレベルの高いマシンが多く、見ているだけでも楽しくて勉強になった。
今回の反省点は、作業に参加するのが遅かったため企画段階から参加できなかった事と、あまりにもできることが少なかったのでメンバーが作業しているのを見ているだけだったことが少なくなかった事。これからはこんな事が無いように少しずつ勉強してできることを増やしていくとともに加工の精度も上げていき、もっとレベルの高いマシンを作っていきたい。
Do not copy without permission.