知能ロボットコンテストJAPAN ’98出場!! – R.U.R
99.3.30更新(by三原)
このページについての質問等は、三原まで
出場ロボット:つみたて君

ここをクリックすると「つみたて君」がウゴウゴ動いている画像がみれます。(要リアルプレイヤー)
上でだめならここをクリック。すべて(689KB)ダウンロードします
初出場ながら、チャレンジコース参加41チーム中5位で1次予選通過。
ロボットの特徴
- 第1の特徴は、ステッピングモータを用いたオープンループの制御(てぬき?)じゃなく、ちゃんと1回転200カウントの光学式インクリメンタルロータリーエンコーダーを左右2つ用いていることだろう。これをもとに、1秒間20回カウントして、現在位置を計算しています。また、読み込みごとのカウント数(速度に相当)と、目標速度との偏差(error)をとり、PI制御(比例積分制御)をしています。これの係数を適切に設定してあげると、すんばらしく、まっすぐ進んでくれます。さらに、位置制御を進行方向にたいしては、PI制御、横方向は、P制御をしています。大会では、意外とこういうことをしてるところは少ないみたいでした。他は、たいていライントレースとステッピングモータみたいで、ロータリーエンコーダーだけというのは、「つみたて君」だけだったかも。
- 第2の特徴は、開発環境とマイコンだと思います。マイコンは、日本システムデザイン製、V25CPU+UPP(ユニバーサルパルスプロセッサ、HD64130P)+ROM-DOS(MS-DOS互換)のものを使っています。プログラム自体は、パソコンのTurboC++4.0Jを使用して、EXEファイルを作成して、そのまま転送、実行ってな感じです。すごいでしょ。C言語のprintf()関数がパソコンの画面に表示、scanf()が、パソコンのキーボード入力をRS232C経由で使えるのです。またOSを搭載しているので、データファイルをロボットを動かしながら、メモリにファイルとして記録できるのです。
- 第3の特徴は、ロータリーエンコーダーをサスペンション付きでとりつけてあるので、ある程度一定のテンションで、路面と接地し、路面の凹凸の影響を最小限にしています。こういうロボットにとって、計数輪が空回りしないことは、結構重要です。
- 第四は、大型フォーク状取り込み機構により、一度に大量のボールを取り込めるのです。そして、後部のドアを開くと、一気に大量得点というわけです。
- こんなロボットが全くのど素人にもつくれたのは、すべて、先輩がたのおかげです。まじで。(下記参照)
製作経緯とお世話になった先輩方
製作動機は、NHKロボコン98(ミラクルタワー)に書類審査に通過しながら、事前審査で不合格となって、せっかく作った、子機があるので、なんかいい使い道ないかなとHPをめぐっていたところ、知能ロボットコンテストというものをみつけ、申請、製作に取りかかったしだいです。
私が入学以前に、このV25ボードを使用して、細洞先輩とか、エスティコさんとかが、自律ロボットを製作していたこともあり、かなり、基礎となるデータや資料、プログラムがあり、NHKロボコンの審査のときは、急遽CPUの変更したにも関わらず、ほぼうまくいったのでした。審査に落ちて、まず最初にやったのは、カウント値をもとに、現在位置を計算するプログラムの完成です。このアルゴリズム考案は、篠宮先輩で、下図のような原理で計算します。これで、一秒に20回くらい読みとれば、ほとんど誤差なく、位置計算ができます。結構これに苦労させられました。もともとできていた速度のPI制御と完成した位置計算をつかって、いかにロボットを進めるかが次の過程でした。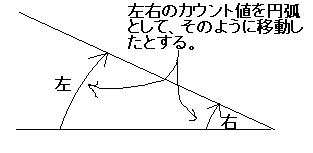
当初は、NHKロボコンの子機(本体部分は阿部先輩製作)は、川崎ロボット大会のギアボックスを使用していたため、遊びが結構あり、微妙な位置決めにとまどっていたところ、大学近くの「岬」のまえで、野村先輩にあい、事情をはなしたところ、一日くらいで、買ってあった、12Vギーアードサーボモーターを使用した、本体を作ってくれました。それまでにも、江田先輩が、取り込み、解放機構を作ってくれました。
プログラムのほうは、いろんな方法で位置制御をしようとしましたが、なかなかうまくいかず、もっとも単純(だとおもってた)で人工知能みたいなIF~THENルールを基本としたアルゴリズムを採用して、一応は完成して、喜んでいたのですが、この方式には、意外な欠点があり、プログラムが実は複雑(デバッグが困難)で、入れ子構造になり、一秒に数10回の計算要求がきて、スタックがあふれてしまうみたいでした。(ほんとのところは、どうかわかってませんが)
それまでにも、浮動小数点演算をサポートしていないV25なので、エミュレーションで計算するので、計算自体が重くなり、一秒あたり20回近くの計算に、間に合わなかったりして、高速化に悩まされたりもしていました。
で、野村さんと悩んだあげく、以前うまくいかなかった、位置をPI制御するアルゴリズムを連日やっているうちに、横方向はP制御のみで、結構いいように動いてくれるようになったので、大会本番はほとんど野村さんが書いた位置制御アルゴリズムでいきました。
大会直前には、当時四年生だった別役さんとかが、ボールを確実に解放する機構をつくってくれたり、博士課程のエスティコさんに制御について、いろいろ電情の私たちに教えてくれました。その他の先輩にもよくお世話になりました。また、今中君には、いろいろ手伝っていただきました。
また、カンパもいただき、とても恵まれた環境だなあと感動したのを思い出します。
知能ロボットコンテストJAPAN ’98 当日のようす
1998/6/27,28 に仙台市科学館にて、知能ロボットコンテスト98が開催されました。
東京農工大学ロボット研究会RURから1台出場しました。
ロボットのコンセプトとして、非ライントレース型、つまり、ロータリーエンコーダーをもちいて、自立走行すること、ロータリーエンコーダー以外のセンサーを用いないことでした。
6月27日早朝3時
ロボットは、前日までの調整で、ほぼ完璧に仕上がる。
位置計算の誤差補正まで、行った。 (これが逆効果となる)
朝6時の新幹線のため、徹夜で、細洞さんの車にて東京駅に。大宮駅で、今中と合流。無事に仙台到着。
市営地下鉄にのって会場に到着。準備をはじめる。といってもとくにすることなかった。
同12時
ついに、東京農工大学ロボット研究会の出番となる。
私は、極度の緊張でがちがち。今中との連携ミスで、5秒くらい時間ロス。
しかし、順調にスタートし、我々は、撮影部隊と化す。
1次予選
スタートは順調にいき、手持ちの1つのボールを確実に、4点ゴールに入れる。
その後、片側7ツのうち、4つをアームで取り込む事に成功。
別役さん考案の機構が功を奏し、すべてを4点ゴールに!!!!
その後、もう片側は、5つ取り込む事に成功したが、バックですすむうちに、
前日におこなった、誤差補正があだとなり、コースに引っかかる。
タイヤが削れ、コースが真っ黒に。。審判のかたに迷惑をかけました。ごめん。
その後:
20点ということで、2次予選に残れるかどうか、心配であった。
敗者復活戦に出場すべく、プログラムの修正を急ピッチでおこなう。
そこに、「25番、東京・・・・ 積み立て君」という2次予選出場チームの発表のアナウンスがあり、2人して大喜び。
2次予選は翌日なので、完璧をきすため、予定していた野宿を取りやめ、JR仙台駅で紹介してもらった、
「ふきよせ」という、旅館にとまる。かなりの疲労のため、数時間睡眠。その後コンビニ弁当で夕食。
そのご、2人で、プログラムの検討をし、明日朝、試走をすることにして、睡眠。
今中は、よくねむれたようだが、私は、緊張してねむれなかった。
2次予選
タイヤの径を33.0から、32.85に換える事によって、完璧!
会場の3階にて、テスト走行、
凸凹が激しい路面であったが、見事に角度がそろったので、32.85でいくことに。
試合がはじまり、順調にスタートし、手持ちのボールを4点ゴールに叩き込む。
しかし、片側のボール1個が、アームの下にきてしまい、やむなくリトライ。
再度プログラムを転送し、再スタート。が、右のタイヤが逆転せず、リトライ。
原因は、FETの接触不良であることがわかっていたので、少し触ってみて、再々スタート。
それでも、直っておらず、リトライ。今度は、逆転するかどうかを確かめてから、再スタートしたが、
今度は、前転がおかしくなり、前にも進まなくなった。その時点で、競技終了。
とても残念な結果でおわってしまった。
その後、私は、インタビューされ、「ほんとは、パーフェクトもねらえるくらいなんですけどね、
残念でした」とコメントし、会場をしばらく離れ、コーヒータイム。
その後
同時開催だった、コンクールに感動。すごかった。
そのご、表彰式があり、我々は、参加賞の光電スイッチをもらい帰宅準備。
新幹線のなかで、打ち上げをし、私が、310教室に行くと、阿部先輩と、
伊敷先輩がおり、まっていてくれた。
結果:
参加41チーム中5位で1次予選通過。(得点20点(5個)総合38.5点)
翌日の2次予選に出場、ボールの位置が運悪くリトライ、
その後、モータードライバーの接触不良により、2度リトライ。
3回目のリトライで、うまくいかず、そこで、試合終了。残念。
P.S.大会の画像。とくに、初得点シーンは必見です。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
製作中の写真(by野村)
画像1/画像2/画像3/画像4/画像5/画像6
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
リンク
知能ロボットコンテストJAPAN(公式ホームページ) 99年度
第10回知能ロボットコンテスト’98(ほ-むぺーじ)
第10回の競技結果
Do not copy without permission.