知能ロボットコンテスト2006 B班 報告書 – R.U.R
知能ロボットコンテスト B班 報告書
2006年度B班 電気屋 兼班長:北島史明
齊藤 俊
佐藤史弥
機械屋 大島津佳


今回、知能ロボットコンテスト(以下、知ロボ)一年生B班として出場した。結果は0点と無惨な結果だった。
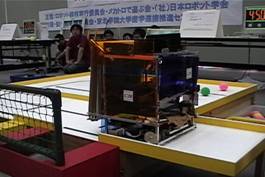
マシンのスペックは
大きさ:(縦×横×高さ) 430×430×800㎜
重さ:5kg
マイコン3664×2、動力としてステッピングモーター、ボールの速さ調整用のDCモーター、扉開閉用・色分け用のサーボモーター数個、カラーセンサ を搭載した。
今回、散々な結果を生んだ主な原因は、本番前日にとりつけたキャスターのためだと思われる。本番前日に両面テープで取り付けたキャスターが当日の走行で外れ、それが原因でうまく走らなかったと思われる。
以下、今回の反省点や学んだことを2007年度以降の入部者が最初にみるものと想定して電気屋と機械屋に分けて記載する。
電気屋
①まず、はじめに足回りの回路を作る。なるべく早期に走るようにすべきである。
②カラーセンサは調整に時間がかかるうえ、自分でつくったものは感度がよくないときもある。市販品の使用を強く勧める。
③各種スイッチは一箇所または一個に統合すべきである。
④プログラムはちょこちょこバックアップをとっておくべきである。
⑤電気屋は機械屋とちがって家でできることも多い。回路の作成やプログラムの作成は家でやって、機械の完成とともにデバックを開始すべきである。このとき家でやるからといって部室に来なくていいわけではなく、機械屋とのコミュニケーションも大切である。これを怠ると、不測の事態が起こることもある。例えば、機械ができてみると基盤をのせるところがなかったりとか。こうした事を防ぐためにもちょくちょく機械屋さんにちゃちゃをいれるべきだ。
⑥電子回路は絶縁をしっかりして、設置にも気を遣った方が良い。
機械屋
①機械ができてないとデバックができないのでなるだけ早く作る。ここでどれだけ早く作ったかで今後の戦略が変わってくるだろう。
②基盤をおくところ、バッテリーをおくところ、スイッチをつけるところ、コードをとおすところなどに関して、設計段階で電気屋とよく話し合っておくべきである。これを怠るとあとで機械屋vs.電気屋の構図ができる。(まぁ、このふたつは対立の関係になる運命にあるのだが・・・)
③設計図をかくこと。設計図をかくと駄目だったところなんかが見えてくるだろう。そこを直しながら作っていくことが重要。面倒でもやらねばならぬ!←我ら経験者達
④でかすぎるマシンはダメ。なるだけ小さく作るべき。重さも軽く作ることは重要。足回りへの負担を極力減らすべき。SPモーターはトルクが弱いから重いと動かない。マシンに使う素材は考えよう。
⑤必ず、パーツはねじ止めすること!
なお、新入生諸君にいえることだが、とにかく時間がない。いや、もとから足りないのだ。知ロボのルール集をみると・・・やや!もう我ら設計段階で皆デバックに入っているではないか!だから勝つことよりも確実に動くマシンを作ろう。さすれば5点は入ること間違いなし!その確実に走るマシンを作るときに計画性は非常に重要。そこで各班の班長はスケジュールを決め、たびたび報告を求めるメールを班員におくると効果的である。
マシンを作るのは大変だが皆でひとつのロボットを作るというのは楽しいものである。終盤に向かうに従い徹夜があり厳しいがよい経験になる。そして丁寧に作ればマシンが答えてくれるだろう。
以上で報告を終わる。 H18.7.14
Do not copy without permission.